
Robot motion planning is a crucial aspect of robotics that involves the development of algorithms and techniques to enable robots to move efficiently and safely in their environment. The primary goal of motion planning is to find a collision-free path between two points in the robot’s workspace, while also satisfying various constraints such as kinematic and dynamic limitations. In this article, we will delve into the different robot motion planning strategies, their strengths and weaknesses, and their applications in various fields.
Introduction to Robot Motion Planning
Robot motion planning is a complex problem that involves finding a valid path for a robot to move from an initial configuration to a goal configuration. The robot’s workspace is typically represented as a configuration space, which is a high-dimensional space that captures all possible poses of the robot. The motion planning problem can be formulated as a search problem in this configuration space, where the objective is to find a path that connects the initial and goal configurations while avoiding collisions with obstacles.
Types of Robot Motion Planning Strategies
There are several types of robot motion planning strategies, each with its own strengths and weaknesses. Some of the most common strategies include:
- Graph-Based Motion Planning: This approach involves representing the configuration space as a graph, where each node represents a feasible configuration and each edge represents a possible transition between configurations. Graph-based motion planning algorithms, such as Dijkstra’s algorithm and A* algorithm, are widely used in robotics due to their efficiency and simplicity.
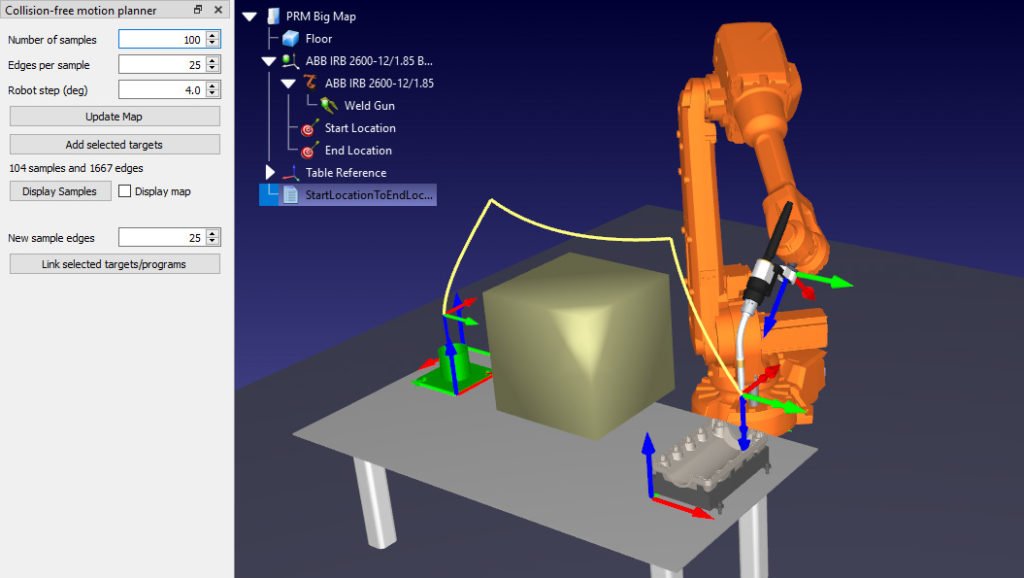
- Sampling-Based Motion Planning: This approach involves randomly sampling the configuration space to generate a set of feasible configurations. Sampling-based motion planning algorithms, such as Probabilistic Roadmap (PRM) and Rapidly-exploring Random Tree (RRT), are particularly useful in high-dimensional spaces where graph-based methods are computationally expensive.
- Optimization-Based Motion Planning: This approach involves formulating the motion planning problem as an optimization problem, where the objective is to minimize a cost function that captures the robot’s performance and safety constraints. Optimization-based motion planning algorithms, such as Model Predictive Control (MPC) and trajectory optimization, are widely used in robotics due to their ability to handle complex constraints and dynamic systems.
- Hybrid Motion Planning: This approach involves combining multiple motion planning strategies to leverage their strengths and weaknesses. Hybrid motion planning algorithms, such as combining graph-based and sampling-based methods, are particularly useful in complex environments where a single strategy may not be sufficient.
Applications of Robot Motion Planning
Robot motion planning has a wide range of applications in various fields, including:
- Industrial Robotics: Motion planning is used in industrial robotics to plan the motion of robots in manufacturing systems, such as welding, assembly, and material handling.
- Service Robotics: Motion planning is used in service robotics to plan the motion of robots in domestic and public environments, such as cleaning, assistance, and healthcare.
- Autonomous Vehicles: Motion planning is used in autonomous vehicles to plan the motion of vehicles in dynamic environments, such as roads and highways.
- Aerospace Robotics: Motion planning is used in aerospace robotics to plan the motion of robots in space, such as planetary exploration and satellite maintenance.
Challenges and Limitations of Robot Motion Planning
Despite the significant advances in robot motion planning, there are still several challenges and limitations that need to be addressed. Some of the key challenges include:
- Computational Complexity: Motion planning algorithms can be computationally expensive, particularly in high-dimensional spaces.
- Collision Detection: Collision detection is a critical component of motion planning, and accurate detection of collisions can be challenging in complex environments.
- Dynamic Environments: Motion planning in dynamic environments, such as environments with moving obstacles, can be challenging due to the need to predict and adapt to changing conditions.
- Robustness and Reliability: Motion planning algorithms need to be robust and reliable to ensure safe and efficient operation in real-world environments.
FAQ
Q: What is the primary goal of robot motion planning?
A: The primary goal of robot motion planning is to find a collision-free path between two points in the robot’s workspace, while also satisfying various constraints such as kinematic and dynamic limitations.
Q: What are the different types of robot motion planning strategies?
A: The different types of robot motion planning strategies include graph-based motion planning, sampling-based motion planning, optimization-based motion planning, and hybrid motion planning.
Q: What are the applications of robot motion planning?
A: The applications of robot motion planning include industrial robotics, service robotics, autonomous vehicles, and aerospace robotics.
Q: What are the challenges and limitations of robot motion planning?
A: The challenges and limitations of robot motion planning include computational complexity, collision detection, dynamic environments, and robustness and reliability.
Conclusion
Robot motion planning is a critical aspect of robotics that enables robots to move efficiently and safely in their environment. The different motion planning strategies, including graph-based, sampling-based, optimization-based, and hybrid motion planning, have their own strengths and weaknesses. While there are several challenges and limitations that need to be addressed, the applications of robot motion planning are vast and diverse, ranging from industrial robotics to aerospace robotics. As robotics continues to advance, the development of more efficient and robust motion planning algorithms will be crucial to enabling robots to operate in complex and dynamic environments. By understanding the different motion planning strategies and their applications, researchers and practitioners can develop more effective and efficient motion planning algorithms that can tackle the challenges of real-world robotics.
Closure
Thus, we hope this article has provided valuable insights into Robot Motion Planning Strategies: A Comprehensive Overview. We hope you find this article informative and beneficial. See you in our next article!
