
Robot locomotion refers to the ability of a robot to move around and navigate its environment. This is a crucial aspect of robotics, as it allows robots to interact with and manipulate their surroundings, making them more useful and versatile. In this article, we will explore the different types of robot locomotion, their advantages and disadvantages, and the current state of research in this field.
Introduction to Robot Locomotion
Robot locomotion involves the use of various mechanisms to generate motion, such as wheels, legs, or thrusters. The choice of locomotion mechanism depends on the specific application and environment in which the robot will be used. For example, robots designed for indoor use may use wheels or tracks, while those designed for outdoor use may use legs or hovercraft technology.
There are several key considerations in designing a robot locomotion system. These include stability, balance, and mobility. The robot must be able to maintain its balance and stability while moving, and it must be able to navigate through its environment with ease. Additionally, the locomotion system must be efficient and reliable, as it will be responsible for propelling the robot and allowing it to perform its tasks.
Types of Robot Locomotion
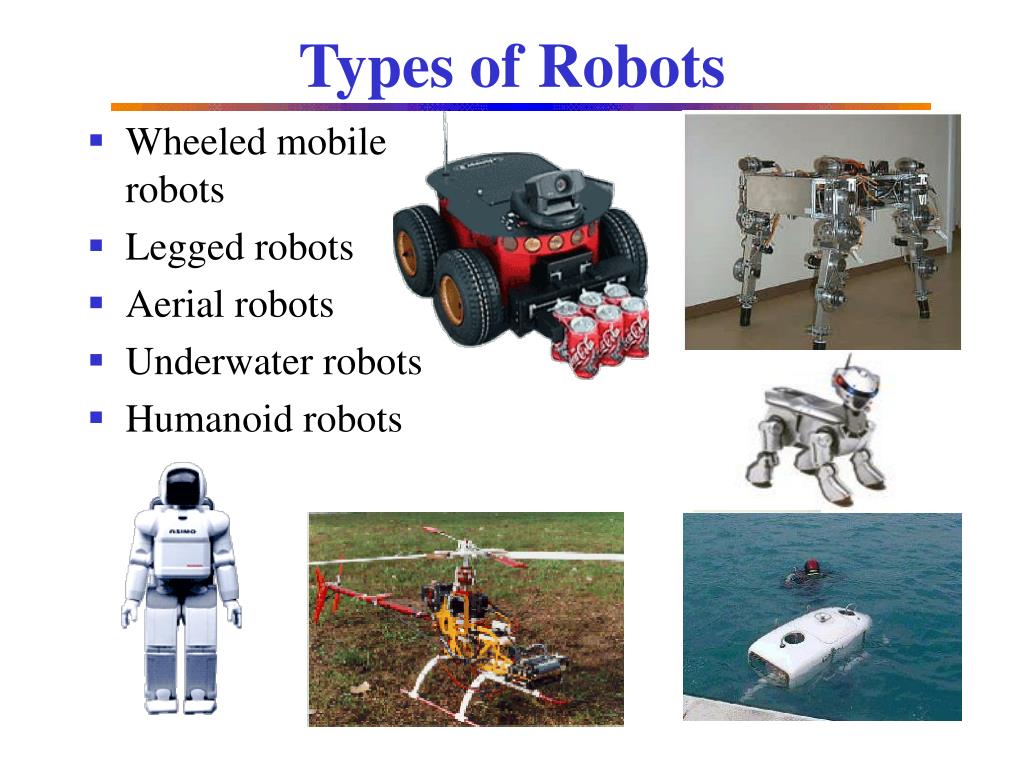
There are several types of robot locomotion, each with its own advantages and disadvantages. Some of the most common types of robot locomotion include:
- Wheeled Locomotion: Wheeled robots use wheels or tires to move around. This is one of the most common types of robot locomotion, as it is simple and efficient. Wheeled robots are often used in indoor environments, such as warehouses or manufacturing facilities.
- Legged Locomotion: Legged robots use legs to move around. This type of locomotion is more complex than wheeled locomotion, as it requires the robot to balance and stabilize itself while moving. Legged robots are often used in outdoor environments, such as search and rescue missions or planetary exploration.
- Hovercraft Locomotion: Hovercraft robots use fans or thrusters to generate lift and propulsion. This type of locomotion is often used in outdoor environments, such as surveillance or inspection missions.
- Swimming Locomotion: Swimming robots use propellers or fins to move through water. This type of locomotion is often used in underwater environments, such as ocean exploration or inspection missions.
- Flying Locomotion: Flying robots use wings or rotors to generate lift and propulsion. This type of locomotion is often used in outdoor environments, such as surveillance or inspection missions.
Advantages and Disadvantages of Robot Locomotion
Each type of robot locomotion has its own advantages and disadvantages. For example:
- Wheeled Locomotion: Advantages include simplicity and efficiency, while disadvantages include limited mobility and difficulty navigating rough terrain.
- Legged Locomotion: Advantages include ability to navigate rough terrain and maintain balance, while disadvantages include complexity and difficulty in designing and controlling.
- Hovercraft Locomotion: Advantages include ability to navigate rough terrain and hover in place, while disadvantages include noise and difficulty in controlling.
- Swimming Locomotion: Advantages include ability to navigate underwater environments, while disadvantages include difficulty in communicating and limited mobility.
- Flying Locomotion: Advantages include ability to navigate aerial environments, while disadvantages include noise and difficulty in controlling.
Current State of Research in Robot Locomotion
Research in robot locomotion is ongoing, with scientists and engineers working to develop new and improved locomotion systems. Some of the current areas of research include:
- Autonomous Navigation: Developing robots that can navigate their environment without human intervention.
- Advanced Sensors: Developing sensors that can detect and respond to changes in the environment.
- Artificial Intelligence: Developing robots that can learn and adapt to new situations.
- Human-Robot Interaction: Developing robots that can interact with humans in a safe and effective manner.
- Soft Robotics: Developing robots that can manipulate and interact with soft materials, such as fabric or tissue.
Real-World Applications of Robot Locomotion
Robot locomotion has many real-world applications, including:
- Search and Rescue: Robots can be used to search for and rescue people in disaster scenarios.
- Manufacturing: Robots can be used to assemble and inspect products in manufacturing facilities.
- Agriculture: Robots can be used to monitor and harvest crops in agricultural fields.
- Healthcare: Robots can be used to assist with surgery and patient care in hospitals.
- Space Exploration: Robots can be used to explore and navigate planetary surfaces.
FAQ
Q: What is robot locomotion?
A: Robot locomotion refers to the ability of a robot to move around and navigate its environment.
Q: What are the different types of robot locomotion?
A: The different types of robot locomotion include wheeled, legged, hovercraft, swimming, and flying locomotion.
Q: What are the advantages and disadvantages of each type of robot locomotion?
A: Each type of robot locomotion has its own advantages and disadvantages, which depend on the specific application and environment in which the robot will be used.
Q: What is the current state of research in robot locomotion?
A: Research in robot locomotion is ongoing, with scientists and engineers working to develop new and improved locomotion systems.
Q: What are some real-world applications of robot locomotion?
A: Robot locomotion has many real-world applications, including search and rescue, manufacturing, agriculture, healthcare, and space exploration.
Conclusion
Robot locomotion is a crucial aspect of robotics, allowing robots to interact with and manipulate their environment. There are several types of robot locomotion, each with its own advantages and disadvantages. Research in robot locomotion is ongoing, with scientists and engineers working to develop new and improved locomotion systems. As robotics continues to advance, we can expect to see even more sophisticated and autonomous robots that can navigate and interact with their environment in a safe and effective manner. With the many real-world applications of robot locomotion, it is an exciting and rapidly evolving field that will continue to shape the future of robotics.
Closure
Thus, we hope this article has provided valuable insights into Robot Locomotion: The Key to Autonomous Robotics. We appreciate your attention to our article. See you in our next article!
